Temps Real
Esquema Planificador de Linux
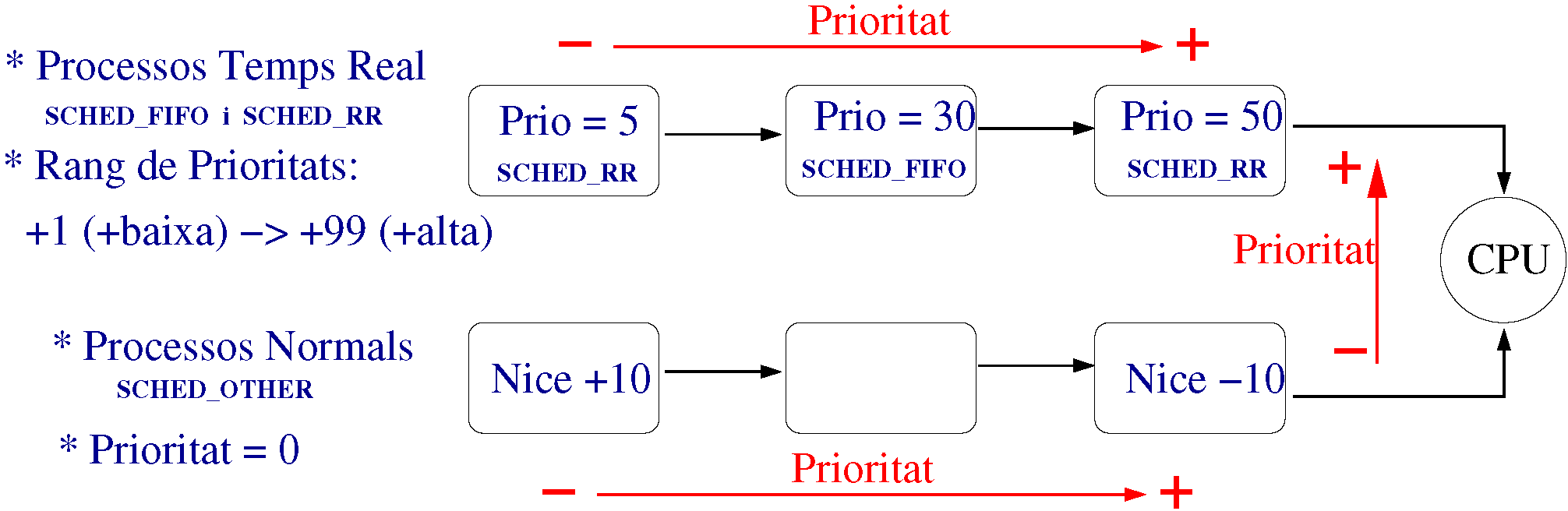
Polítiques de planificació:
-
SCHED_FIFO: FIFO (molt perillós)
-
SCHED_RR: Round Robin
-
SCHED_OTHER: Round Robin però quan tots els processos han gastat 1 Quantum (210ms) es replanifica de nou tornant a donar a tots els processos 1 Quantum més d'execució. Assegura que cap procés entri en inanició.
Crides a sistema (en llenguatge C)
• Modificar la política i prioritat de planificació d'un procés:
int sched_setscheduler(pid_t pid, int politica, const struct sched_param *p);
on
struct sched_param {
int sched_priority;
}
• Obtención de la política de planificació d'un procés:
int sched_getscheduler(pid_t pid); // retorna la política de planificació
• Obtenció de la prioritat de planificació d'un procés:
int sched_getparam(pid_t pid, struct sched_param *param);
• Obtenint la prioritat màxima i mínima d'una política de planificació:
int sched_get_priority_max(int politica);
int sched_get_priority_min(int politica);
• Abandonar la CPU:
int sched_yield(void);